arXiv 2026
Surflo: Consistent 3D Surface Flow from a Global State
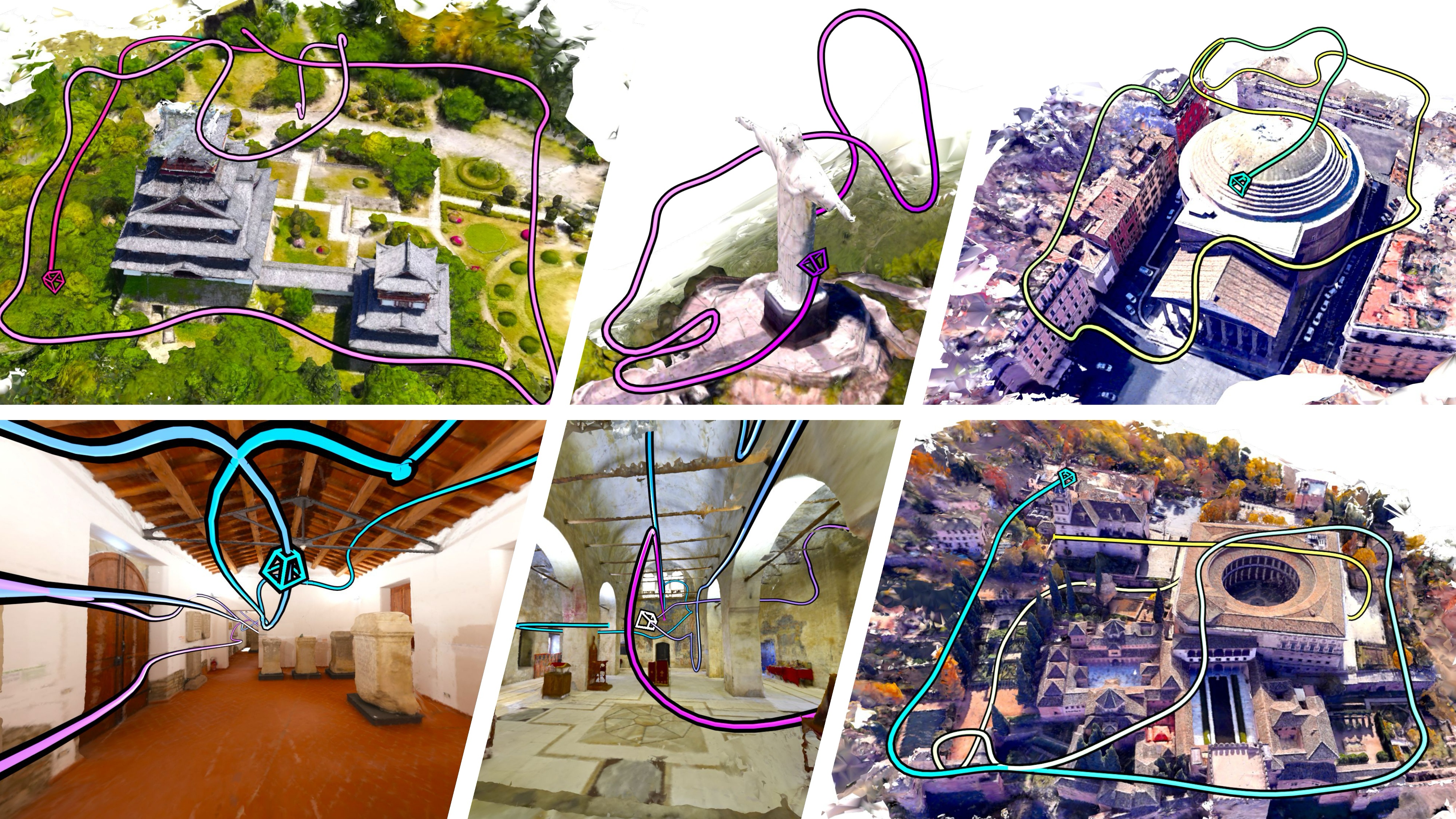
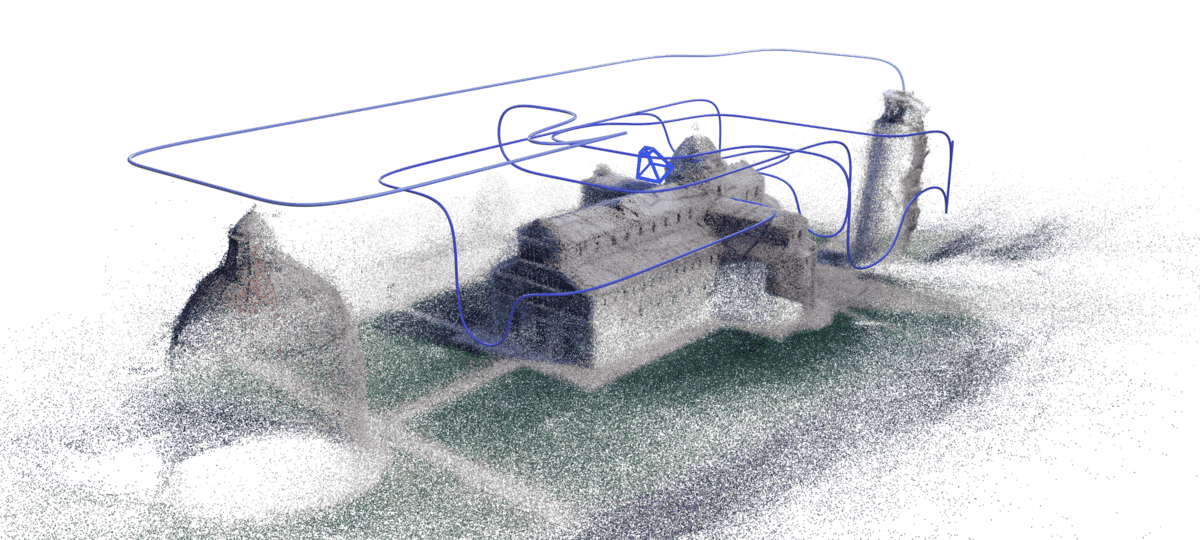
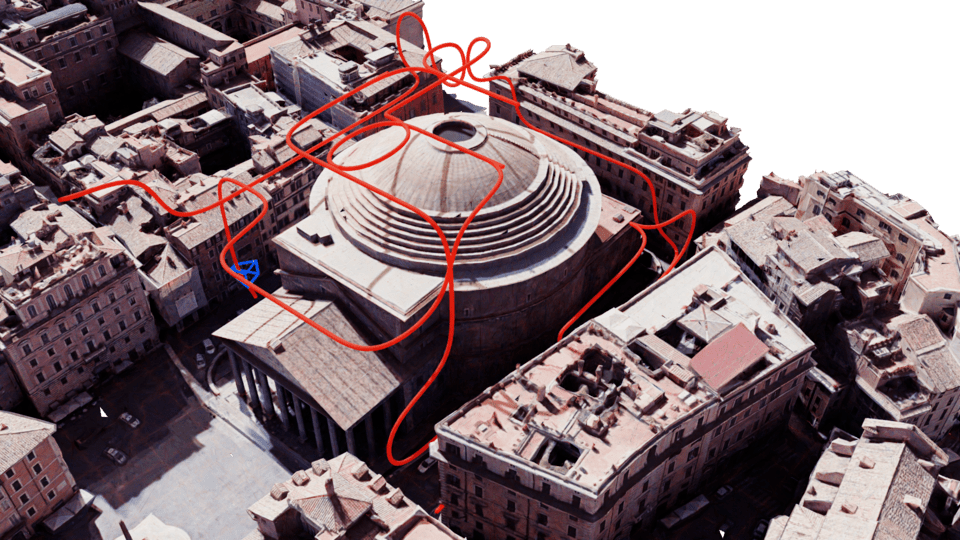
Surflo reconstructs 3D surfaces from a variable number of unposed images by fusing them into a single, fixed-size global latent state of K = 128 tokens. A flow-matching decoder then samples surface points at any resolution from this state, while a lightweight guidance couples the otherwise-independent per-point ODEs so they assemble into a single coherent surface. Surflo reaches state-of-the-art accuracy across eight benchmarks, from 2 to 64 input views.
*These authors contributed equally to the paper.
@article{guedon2026surflo,
title={Surflo: Consistent 3D Surface Flow from a Global State},
author={Gu{\'e}don, Antoine and Nakamura, Shu and Dufour, Nicolas and Lei, Jiahui and Nishino, Ko and Kanazawa, Angjoo},
journal={arXiv preprint},
year={2026},
}